Сельскохозяйственный робот
Информация приведенная в этой статье не будет содержать готовый проект сельскохозяйственного робота, я не ставил такой задачи. Но описание подскажет оптимальный путь для разработки действующей модели. Подобные машины смогут заменить дорогую узко специализированную технику. Низкая стоимость эксплуатации и универсальность делает её очень привлекательной с точки зрения любого заграничного фермера.
Описание работы основного агрегата
Посевные работы обычно начинаются с распашки земли. В больших хозяйствах используют плуг, средняя глубина распашки 300 мм. Можно использовать «U» образные ножи, каждый срезает пласт в 150 мм на него наносится жидкое удобрение, затем он стерилизуется ультрафиолетовым излучением и переворачивается. Верхний пласт укладывается на место нижнего, тот в свою очередь попадает на верх. Используется классический принцип движения и работы плуга, но модернизированный, земля подвергаются более емкой обработке. Совмещается процесс внесения удобрений и распашки. Сразу же выполняется посев, в зависимости от семенного материала подбираются манипуляторы. Решится вопрос с прореживанием Требуется обработать массивы данных для подбора ширины ножей, длины и формы переворачивающих лотков, но показатель ширины одного прохода обработки не так важен при использование электроэнергии. Такой агрегат уложится в габариты 1м х 2м. Важна несущая способность главного узла, моста, по нему будет двигаться основной агрегат. Он будет воспринимать весовые нагрузки от агрегатов, собранного урожая, посевного материала, сыпучих удобрений. Здесь будут находится жидкостные насосы полива и удобрений, трубопроводы, распределительная лента подачи, управляющая аппаратура. Оптимальная длина моста робота 100 метров, но думаю что конструктивный материал для таких размеров пока дорог.
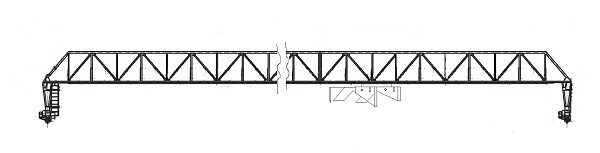
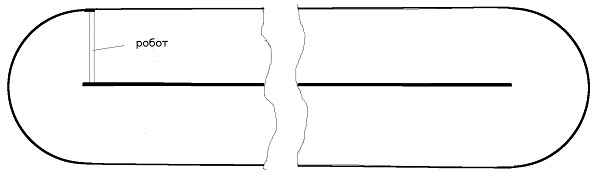
Потребуется укладка рельсовых путей для задания траектории движения такой махины.
В средней части находятся подводы трубопроводов и кабельных линий.
Алгоритм работы
Одна из важных частей работы такого комплекса, программное обеспечение. Требуется решить вопросы: распознавания, прополки, контроля всхода, уборки урожая и др. При фиксированной площади возделывания алгоритм их решения будет схож на работу струйного принтера. При посадки будут фиксироваться координаты места посева, лишние всходы удалятся.
Экономические выводы
Появление подобных механизмов прогнозировалось 10 лет назад, а причины по которым этого не произошло просты. Вся авто строительная отрасль контролируется нефтедобывающими и перерабатывающими компаниями. Появление подобных роботов сужает рынок потребления углеводородов и сельхозтехники, а это достаточно доходно-устойчивые в денежном плане статьи прибыли в любой развитой стране. Эффективность расходов и содержания настолько сбалансирована, что любой фермер вместо низкорентабельного бизнеса получает возможность быстрого развития и обогащения. Стоимость робота будет сопоставима с покупкой хорошего трактора или комбайна, но ему не требуется водитель и он работает круглосуточно.
Разработка подобной машины требует крупных вложений, но они сопоставимы с затратами на поиск и синтез гербицидов и генномодифицированных растений. Прибыль от продажи которых возвращается быстрее из-за ограничений при покупки и отсутствия конкуренции. В расчеты правда не идут отравленные люди и земля, на которой кроме специальных культур ничего не растет.